




Home Brew -Loop Controller
Click Image to
enlarge
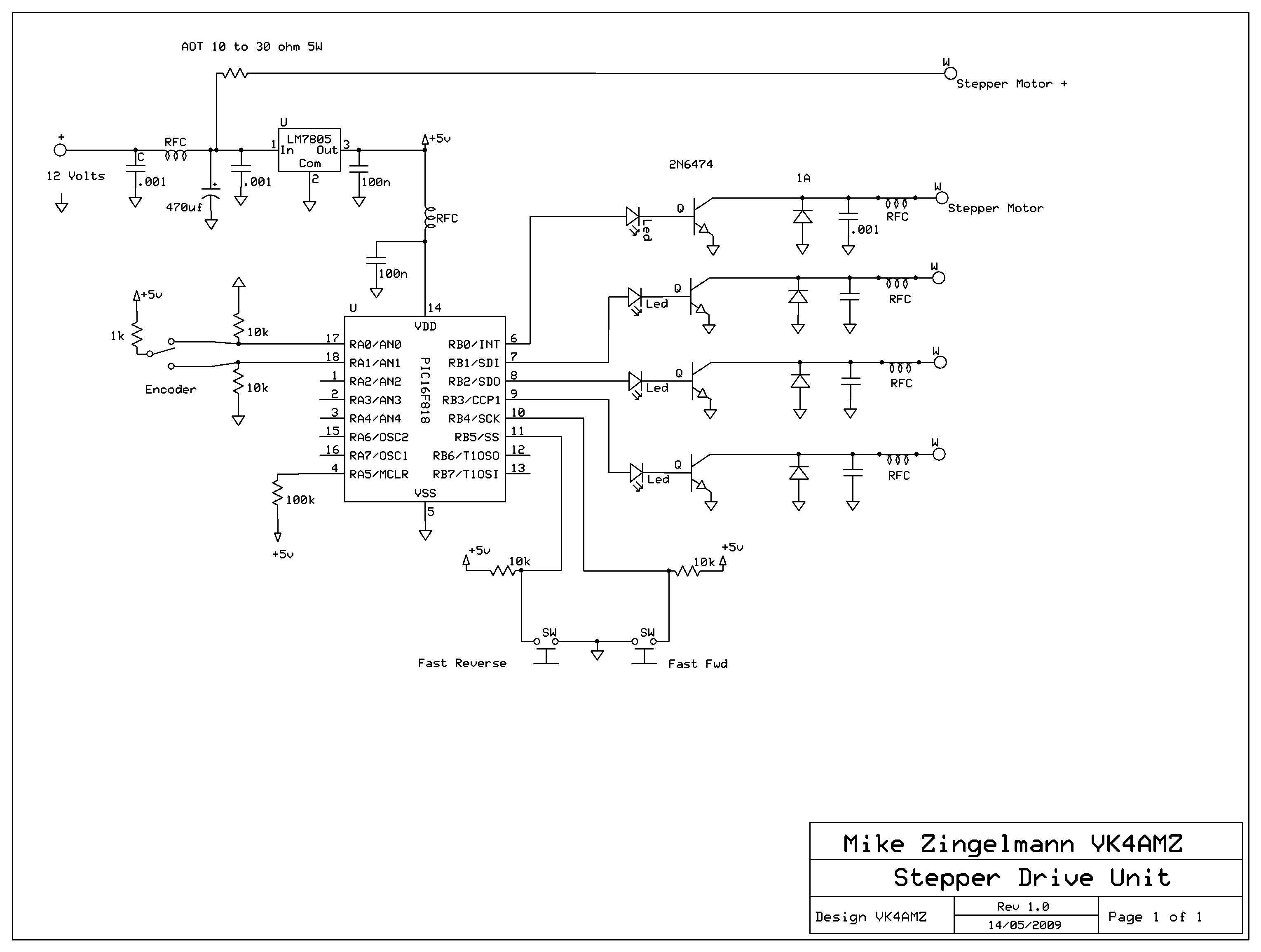
I used a 6 lead Unipolar stepper motor, don't know where it came from, just one I collected
over the years. It's about 45mm long and 40mm wide rated at about 2.5 amps @ 5 volts
with 1.8 deg per step. You will not need one this big if you are turning a small vacuum cap.
The rotary Encoder is available from http://www.minikits.com.au/products.html#encoders
Order No Description Each
EC12E ALPS Rotary Encoder about $2.20
KNOB2 71 Series 28mm dia with cap about $9.00
Suit 6mm EC12E Shaft
Email me if you want the Hex files alternatively for the cost of PIC's and postage I can send you the pre-programmed micro controllers.
The rotary Encoder is available from http://www.minikits.com.au/products.html#encoders
Order No Description Each
EC12E ALPS Rotary Encoder about $2.20
KNOB2 71 Series 28mm dia with cap about $9.00
Suit 6mm EC12E Shaft
Email me if you want the Hex files alternatively for the cost of PIC's and postage I can send you the pre-programmed micro controllers.
There are a few problems to consider and overcome when driving the loop tuning capacitor.
If you are using an air variable you should be able to physically drive it directly with a small stepper motor. If you are driving a large 40 turn 1000pf Jennings vacuum you will not be able to turn it without using a reduction drive.
Selecting the correct value of cap and keeping the loop operation to one band may relieve the need for tiny fractional adjustments however if the loop is very small for the band of operation you will need a reduction drive.
A Loop covering a couple of bands will need a resolution close to 0.02pf per step to tune the loop on its lowest band. A 20 turn 7 to 100pf vacuum capacitor on a 12 foot diameter 80m loop can be driven directly with a motor having 1.8 deg per step. That is roughly 5pf per revolution of the cap which comes back to around 0.025pf per step. If you find you need substantially less resolution then you are either using a large loop for the frequency of operation or you have an incorrectly built or sited loop with high loss and low Q.
This is an important point; I have seen numerous web sites claiming the 3:1 SWR bandwidth of their 160m copper loop was up to 15 kHz wide from a loop 1.5m in diameter. A small HI Q loop at fractional wavelengths will not have that bandwidth. The second point is that a loop much smaller than 3.6m in diameter will not be usable on SSB on 160m as the transmit bandwidth will be so narrow that your SWR will swing from more than 4:1 to 7:1 as you talk. If it does not then you have a low Q loop with very poor efficiency.
My loop at 3.6 meters diameter has a 2:1 bandwidth of around 1.6Khz on 160m. The loss must be very high in these other loops and looking at the capacitor choice, braid connections employed and the location of their loop it's no wonder there was no difference between the copper pipe loop and a thin wire loop they had constructed; HI resistive and induced loss causing low Q and wide bandwidth.
Another reason to keep the physical loading on the stepper motor low (by using a reduction drive) and especially with a vacuum cap is to allow it to run at HI speed to move across the band quickly with fast forward/fast reverse buttons. The final adjustment is best carried out using a low cost rotary encoder to single step as it allows you to rock the cap back and forward to overcome any play or flex in the drive, coupling or construction.
Once again if you are using an air variable you may get away without a gearbox. Micro stepping of the motor reduces the torque and brings other problems with it. Using a value of cap that just covers that part of the band you are interested in may help. If the tuning of a loop is touchy or difficult you will find yourself tiring of it and not using it.
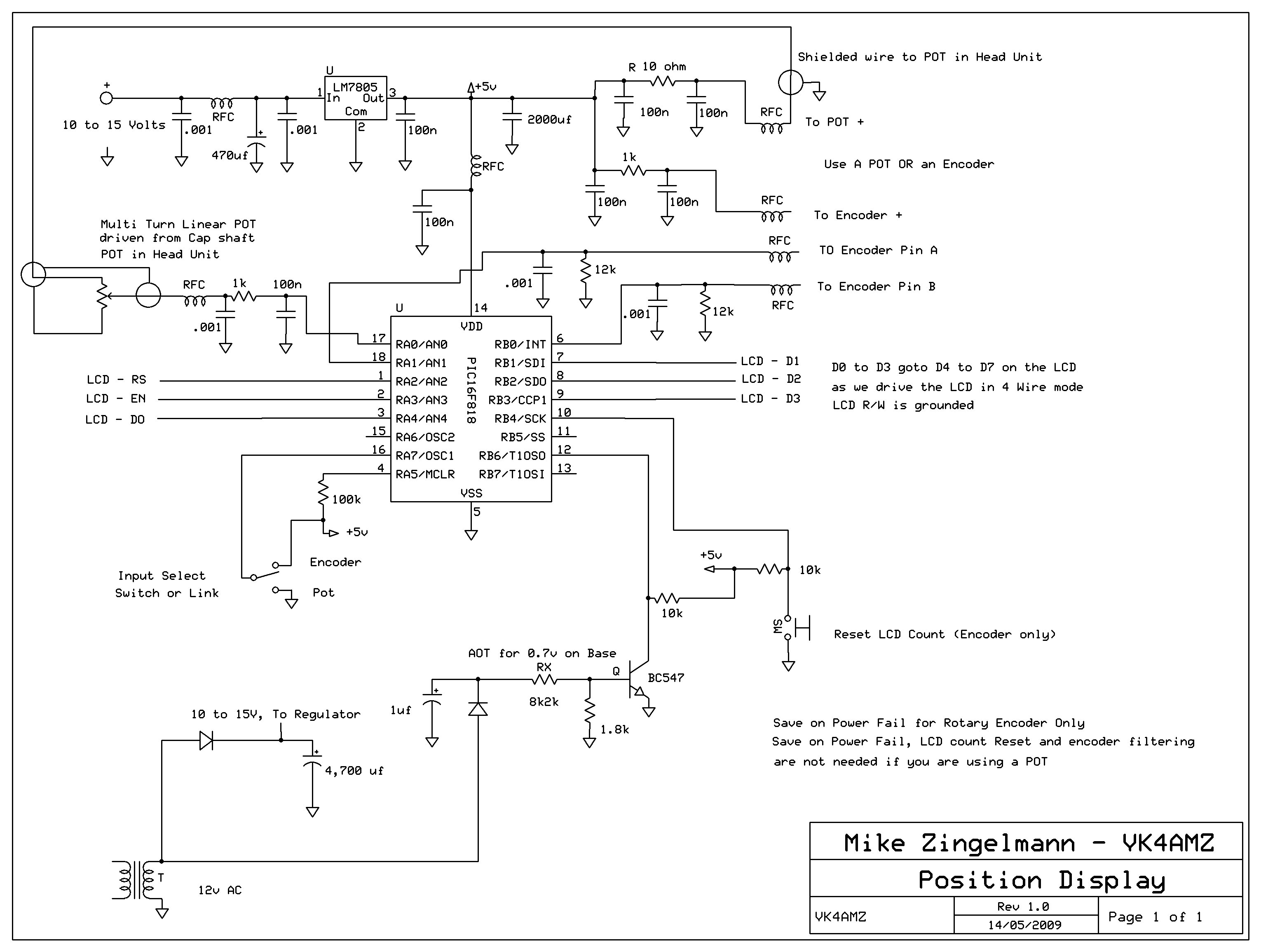
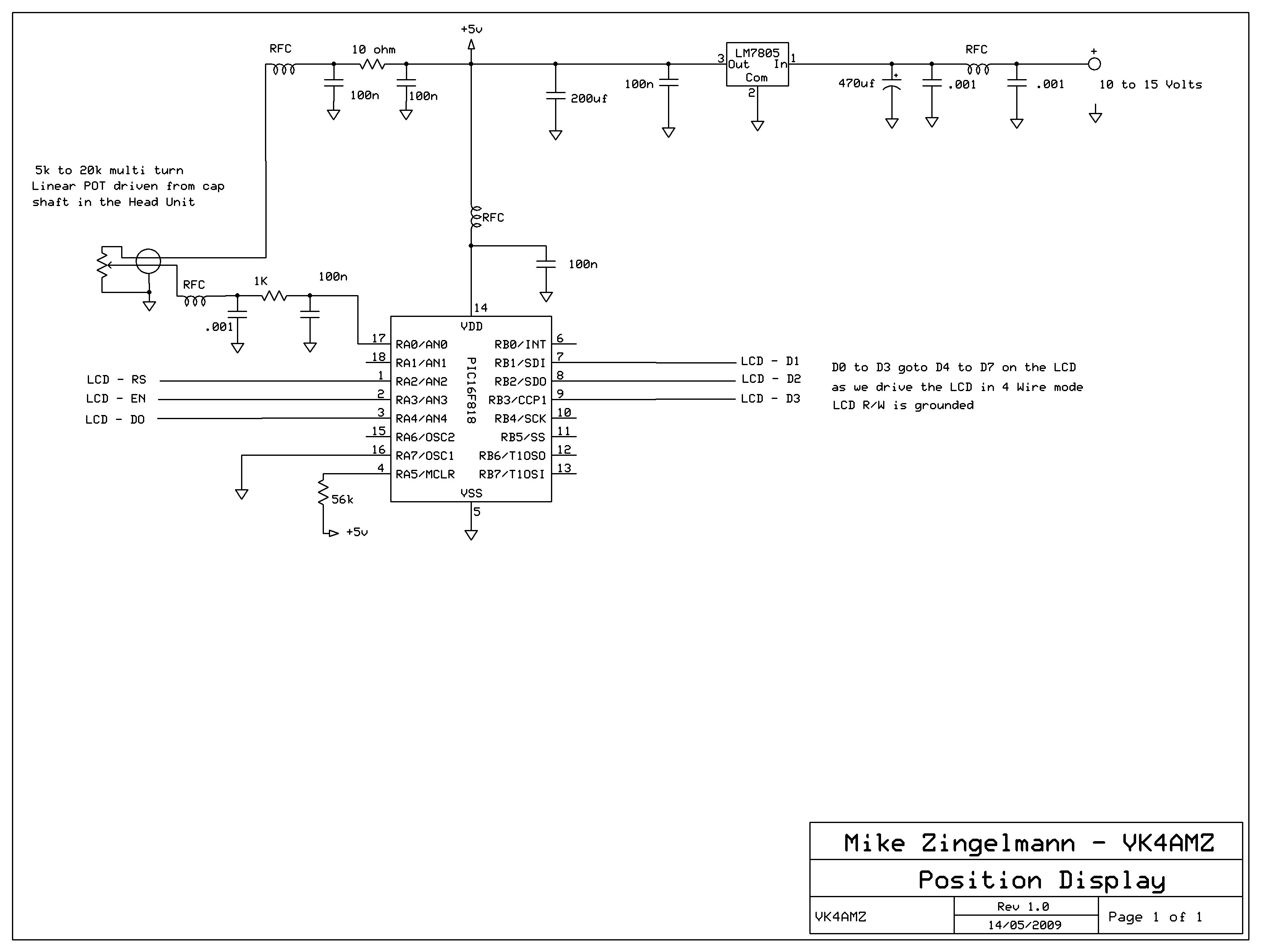
You can couple a high quality multi-turn variable resistor (pot) to the shaft of the capacitor and use a micro controller to accurately read the position and return to that position. The problem with a HI Q Loop is that any change in the surroundings including the ground plane will cause a slight change in adjustment so returning to the exact same position my not yield the correct tuning position. However it will be close and using a rotary encoder to rock the stepper makes final tuning a breeze.
If you are using an air variable you should be able to physically drive it directly with a small stepper motor. If you are driving a large 40 turn 1000pf Jennings vacuum you will not be able to turn it without using a reduction drive.
Selecting the correct value of cap and keeping the loop operation to one band may relieve the need for tiny fractional adjustments however if the loop is very small for the band of operation you will need a reduction drive.
A Loop covering a couple of bands will need a resolution close to 0.02pf per step to tune the loop on its lowest band. A 20 turn 7 to 100pf vacuum capacitor on a 12 foot diameter 80m loop can be driven directly with a motor having 1.8 deg per step. That is roughly 5pf per revolution of the cap which comes back to around 0.025pf per step. If you find you need substantially less resolution then you are either using a large loop for the frequency of operation or you have an incorrectly built or sited loop with high loss and low Q.
This is an important point; I have seen numerous web sites claiming the 3:1 SWR bandwidth of their 160m copper loop was up to 15 kHz wide from a loop 1.5m in diameter. A small HI Q loop at fractional wavelengths will not have that bandwidth. The second point is that a loop much smaller than 3.6m in diameter will not be usable on SSB on 160m as the transmit bandwidth will be so narrow that your SWR will swing from more than 4:1 to 7:1 as you talk. If it does not then you have a low Q loop with very poor efficiency.
My loop at 3.6 meters diameter has a 2:1 bandwidth of around 1.6Khz on 160m. The loss must be very high in these other loops and looking at the capacitor choice, braid connections employed and the location of their loop it's no wonder there was no difference between the copper pipe loop and a thin wire loop they had constructed; HI resistive and induced loss causing low Q and wide bandwidth.
Another reason to keep the physical loading on the stepper motor low (by using a reduction drive) and especially with a vacuum cap is to allow it to run at HI speed to move across the band quickly with fast forward/fast reverse buttons. The final adjustment is best carried out using a low cost rotary encoder to single step as it allows you to rock the cap back and forward to overcome any play or flex in the drive, coupling or construction.
Once again if you are using an air variable you may get away without a gearbox. Micro stepping of the motor reduces the torque and brings other problems with it. Using a value of cap that just covers that part of the band you are interested in may help. If the tuning of a loop is touchy or difficult you will find yourself tiring of it and not using it.
You can couple a high quality multi-turn variable resistor (pot) to the shaft of the capacitor and use a micro controller to accurately read the position and return to that position. The problem with a HI Q Loop is that any change in the surroundings including the ground plane will cause a slight change in adjustment so returning to the exact same position my not yield the correct tuning position. However it will be close and using a rotary encoder to rock the stepper makes final tuning a breeze.